Soft Body Simulator
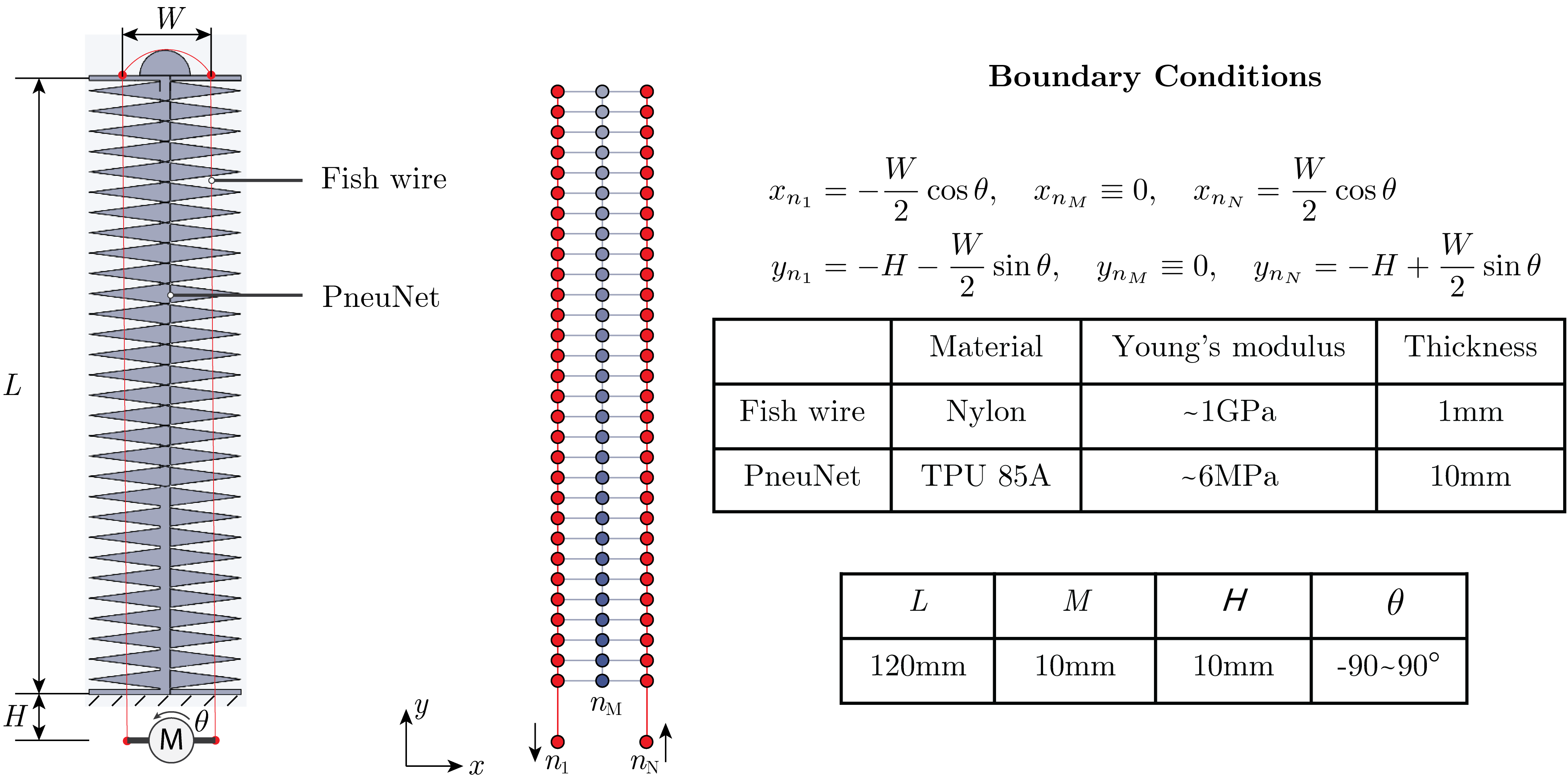
Developed numerical frameworks leveraging discrete differential geometry and physics-informed machine learning to model, simulate, and inverse design flexible structures, advancing soft robotics and elastic rod mechanics.

Developed numerical frameworks leveraging discrete differential geometry and physics-informed machine learning to model, simulate, and inverse design flexible structures, advancing soft robotics and elastic rod mechanics.
Developed a control scheme combining discrete differential geometry and physics-informed machine learning for real-time control, enhancing the performance of soft robots in complex environments.

Developed bio-inspired robotic systems for peristaltic transport and flagellated swimming, exploring soft actuation, proprioceptive control, and hydrodynamic interactions.

Investigated the locomotion of undulatory swimming robot groups in close proximity, examining how swarm synchronization emerges through autonomous or externally driven actuation.

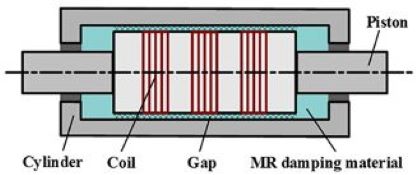
Advanced a novel design of damping and stiffness controllable semi-active suspension, which outperform passive system in both theoretical analysis and experimental evaluation significantly.
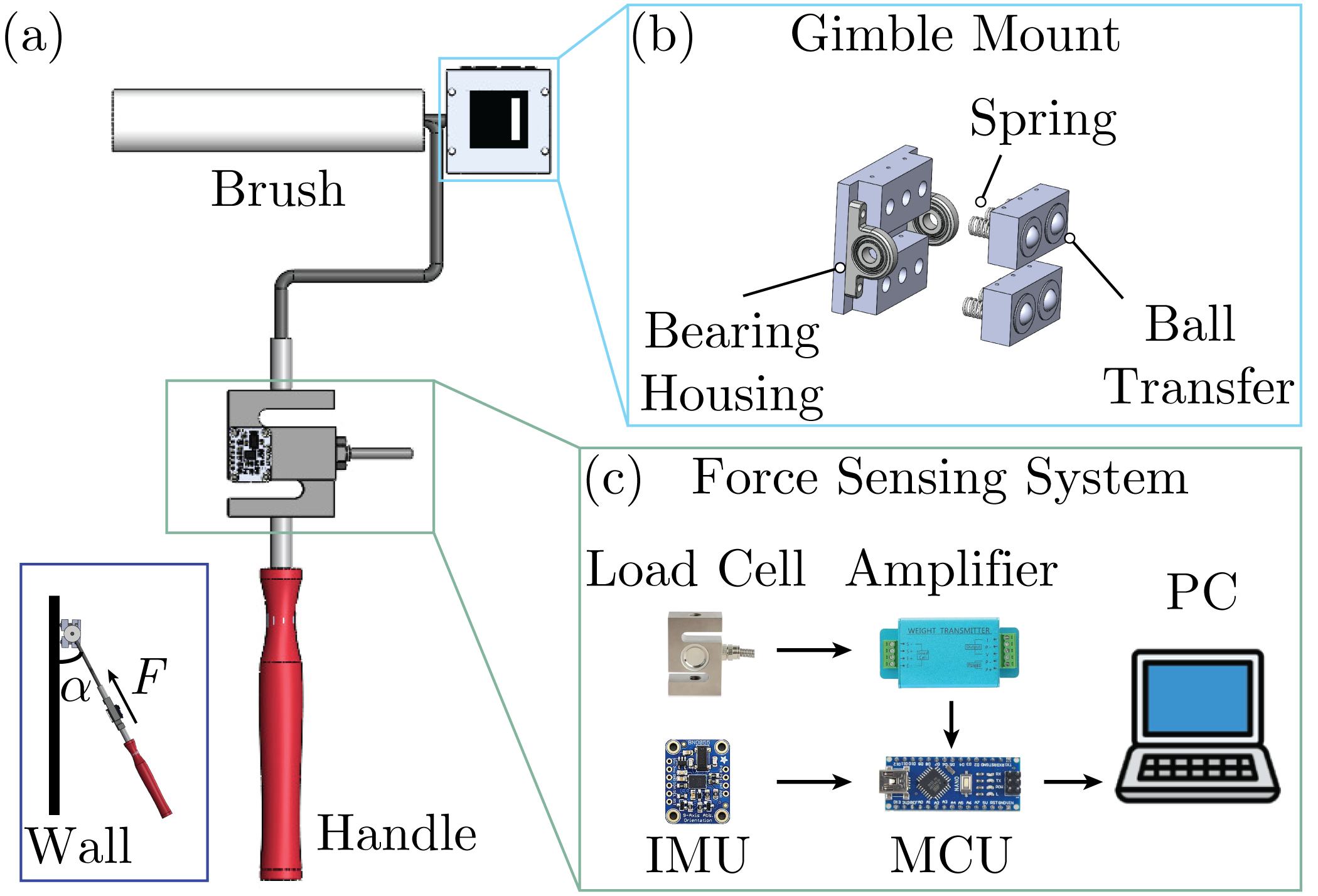
We use collaborative robots to emulate human painting demonstrations.
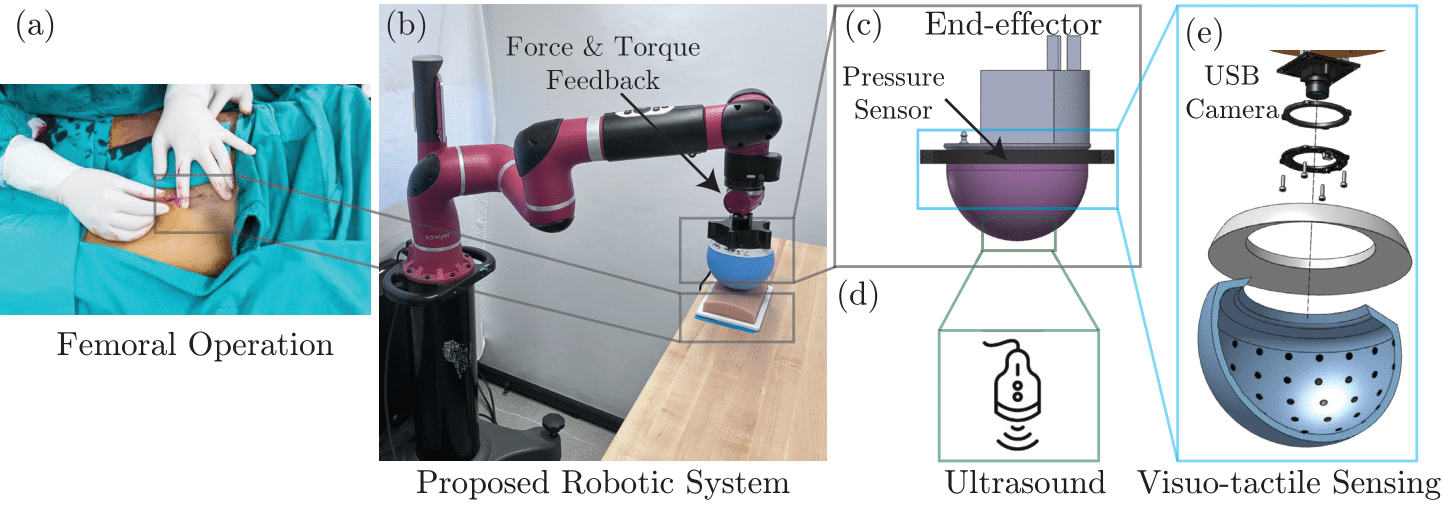
We propose a closed‐loop robotic system with four sensing modalities — combining a soft pneumatic end‐effector with force feedback, internal pressure sensing, real-time ultrasound, and unprecedented full-field visuo‐tactile deformation tracking — to actively detect bleeding, adjust compression, and ensure safe and effective hemostasis.